The Hukuyo URG is a lightweight, affordable USB powered lidar sensor. It outputs a single planar scan with 240º scanning range at 0.36º angular resolution and scan rate of 100ms/scan. This sensor can be used for, amongst other things, indoor mapping or collision avoidance.

There is presently no pre-compiled driver available for ROS kinetic so installing from source is the only option.
Install prerequisites
The ROS hokuyo_node depends on the driver_common package which must be installed from source:
cd ~/robot_ws/src- Clone the repository:
git clone https://github.com/ros-drivers/driver_common.git. This is a meta-package. - Build the project:
cd ~/robot_wsand thencatkin_make
Install ROS hokuyo_node from source
Installing the hokuyo_node from source is straightforward. Simply clone the GitHub repository and install:
cd ~/robot_ws/src- Clone the repository:
git clone https://github.com/ros-drivers/hokuyo_node.git - Compile the source:
cd ~/robot_wsand thencatkin_make
Configure the driver
The Lidar needs to be configured for read write before it can be used in ROS. A summary of this can be found on the UsingTheHokuyoNode tutorial page. This configuration must be done each time the sensor is connected to a USB port so it may be worthwhile automating this process.
First check the permissions using: ls -l /dev/ttyACM0. If you don’t see crw-rw-rw- you will need to update the permissions using sudo chmod a+rw /dev/ttyACM0. This sets the sensor in read write mode.
Troubleshooting
The order in which you install the packages matters. First install the dependency, driver_common, then install the hokuyo_node package to avoid compilation errors.
Run the Lidar and visualise the data
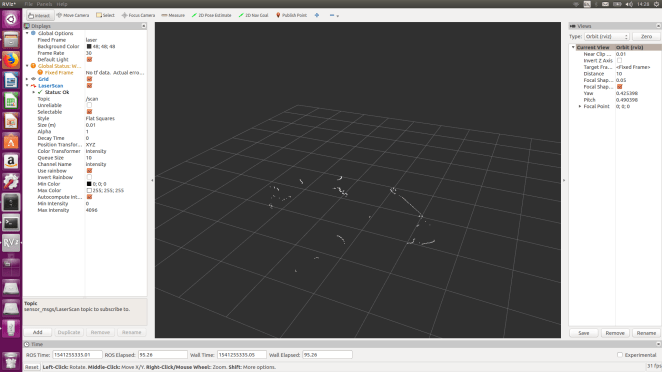
A visualization of the /scan topic in RViz
Once the driver has been installed and configured, running the Hukuyo URG is simply a matter of executing the node.
- Make sure that ROS is running:
roscore - Run the node:
rosrun hokuyo_node hokuyo_node. This node publishes the scan data on the /scan topic. - Visualize the node in Rviz:
rosrun rviz rviz
